Munar Rover
Because the anomaly was on uneven terrain —not because the landing precision of the Apollo lander was so bad— mission planners determined that the kerbonauts would need some form of surface locomotion in order to reach it.
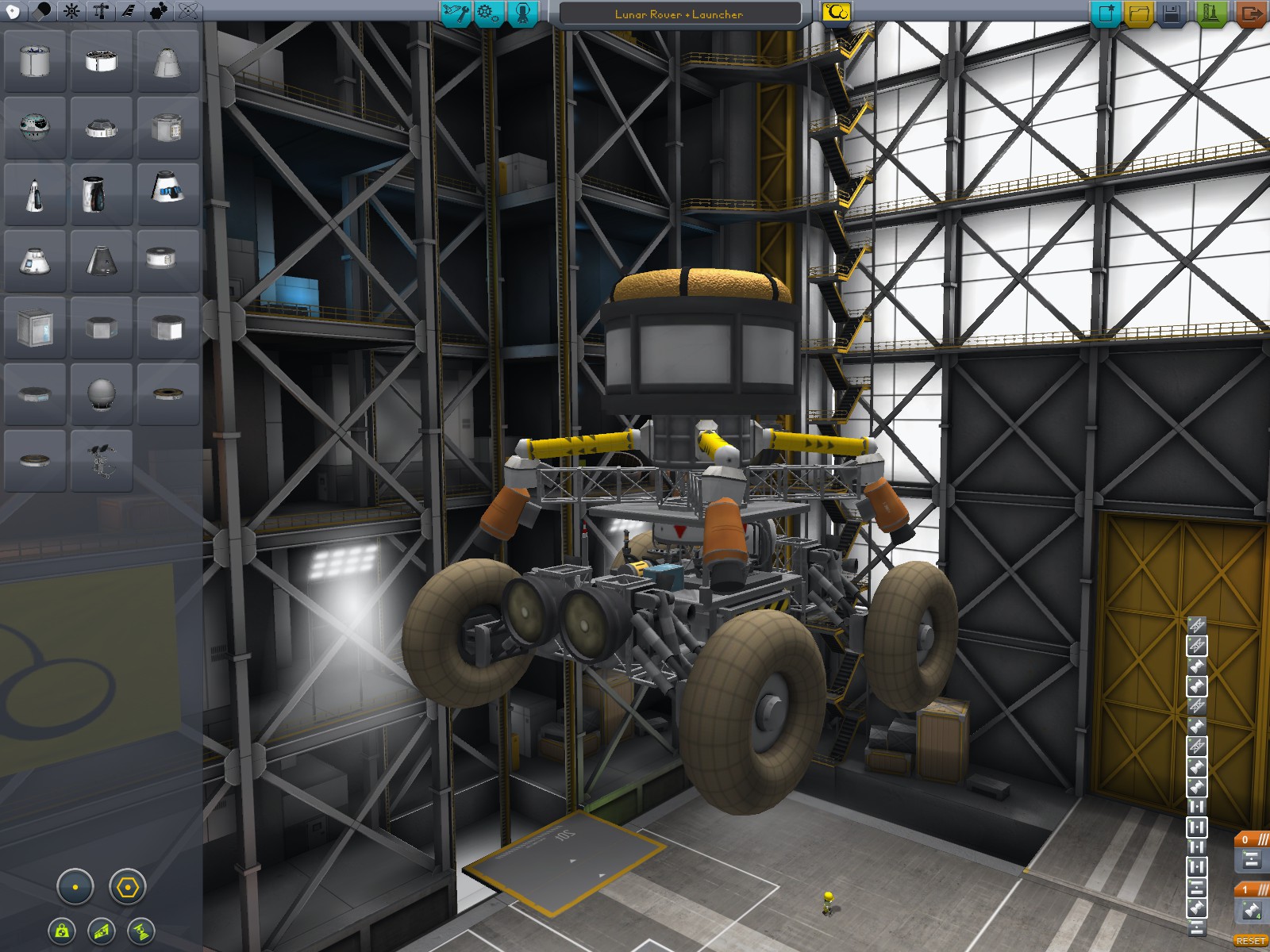
This prompted the design and testing of a Munar rover or buggy vehicle. After considering various design options and testing a few prototypes, engineers settled for a four-wheel, two-kerbonaut rover, which would be delivered to the surface by skycrane.
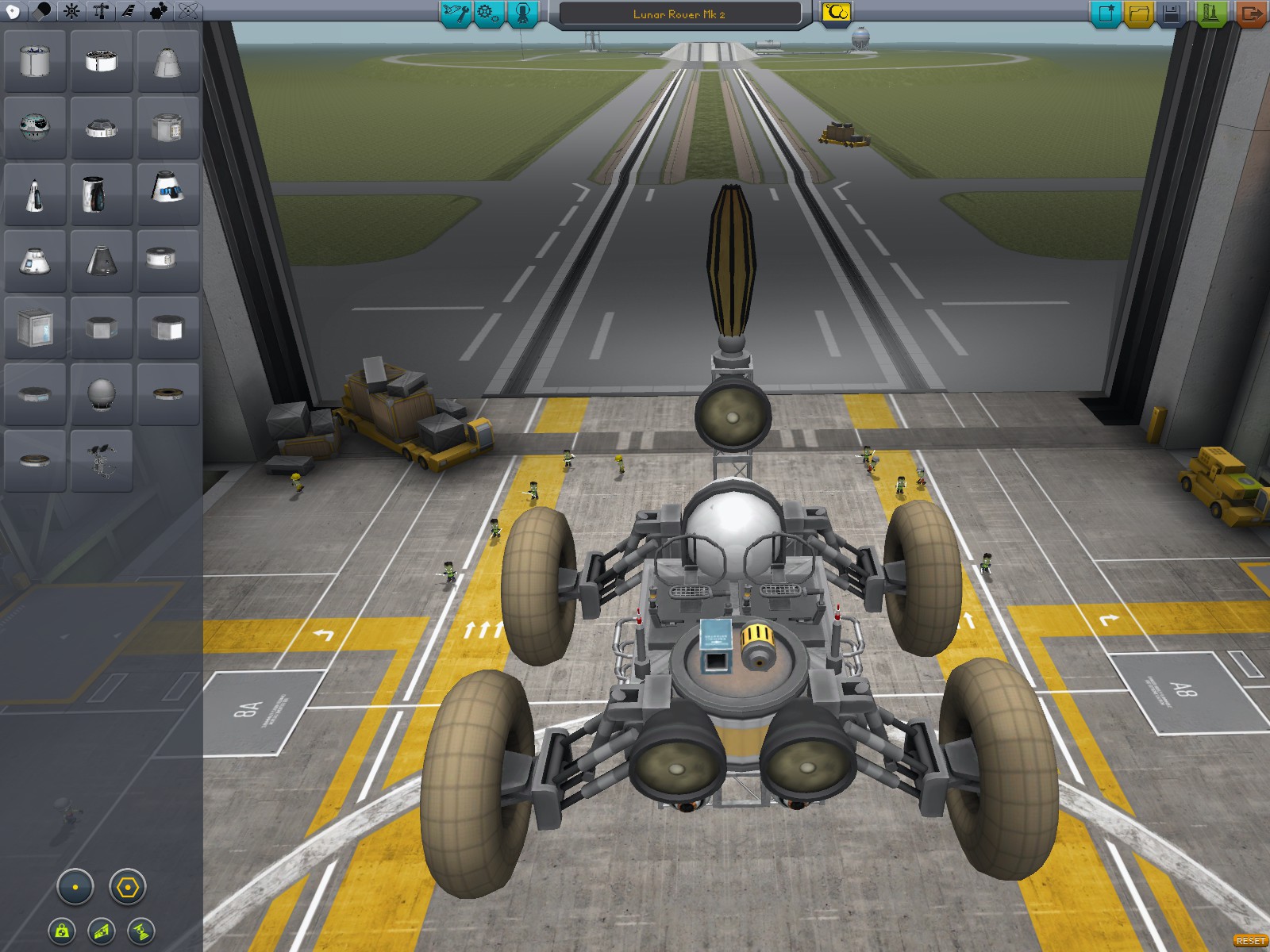
The rover was powered by two radioisotope thermoelectric generators and included large battery banks to keep the wheel motors and other systems powered for a very long time. This ensured the rover could operate even at night and travel long distances without having to stop. It had seats for two, which matches the crew size of the Apollo lander.
The skycrane system would be in charge of putting the rover on the surface. After successful touchdown, it would decouple and fly away, crashing nearby. This eliminated the need for a bulkier lander vehicle.
Another feature of the rover was its autonomous capabilities, which allowed operators back on Kerbin to either drive the rover on remote control, or let it follow a program fully autonomously. This permitted conducting an initial examination of TGA-1 before kerbals would be sent to the Mun.
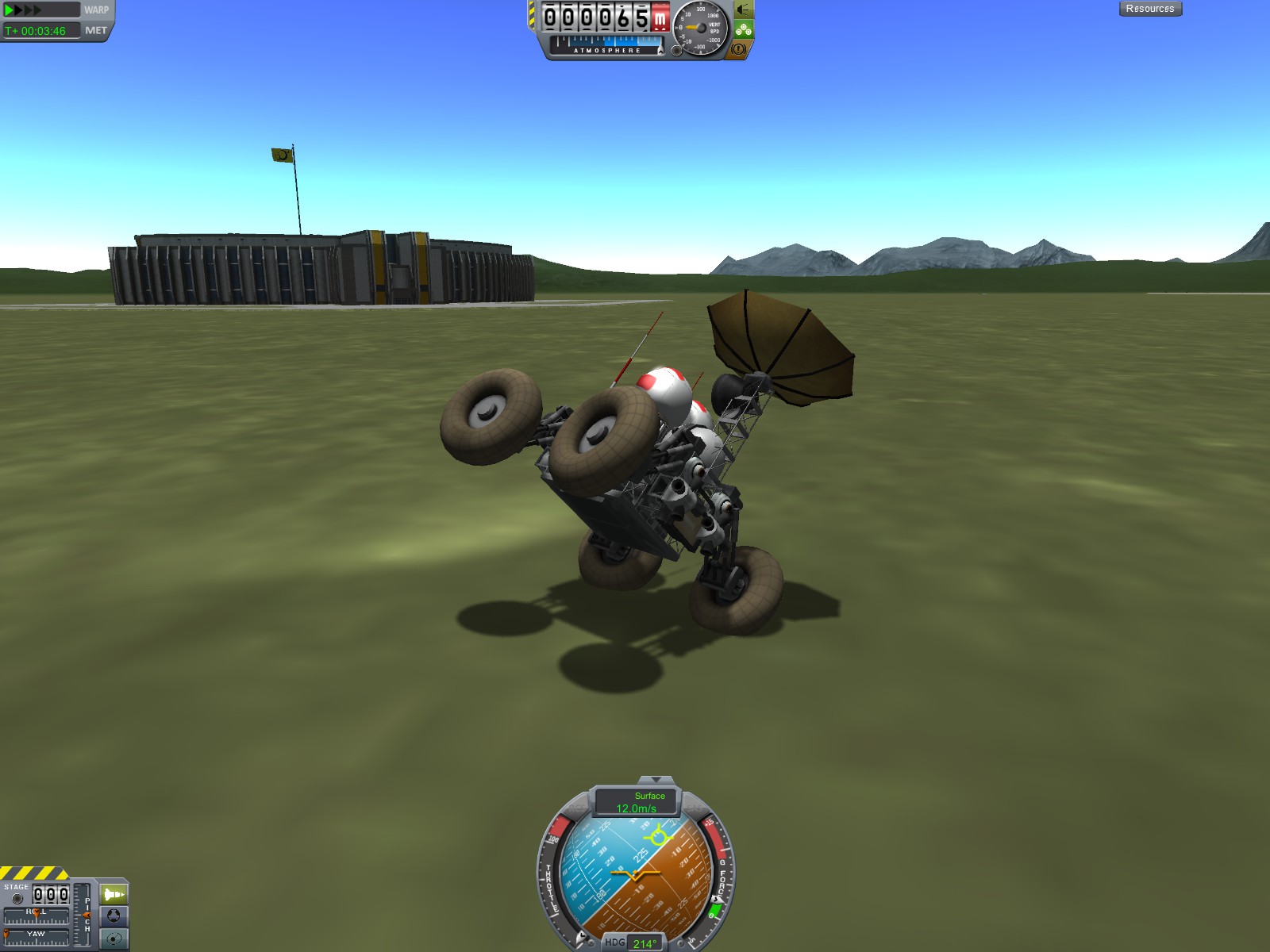
Extensive Kerbin ground testing assured the rover would be able to operate safely and reliably on the Mun.



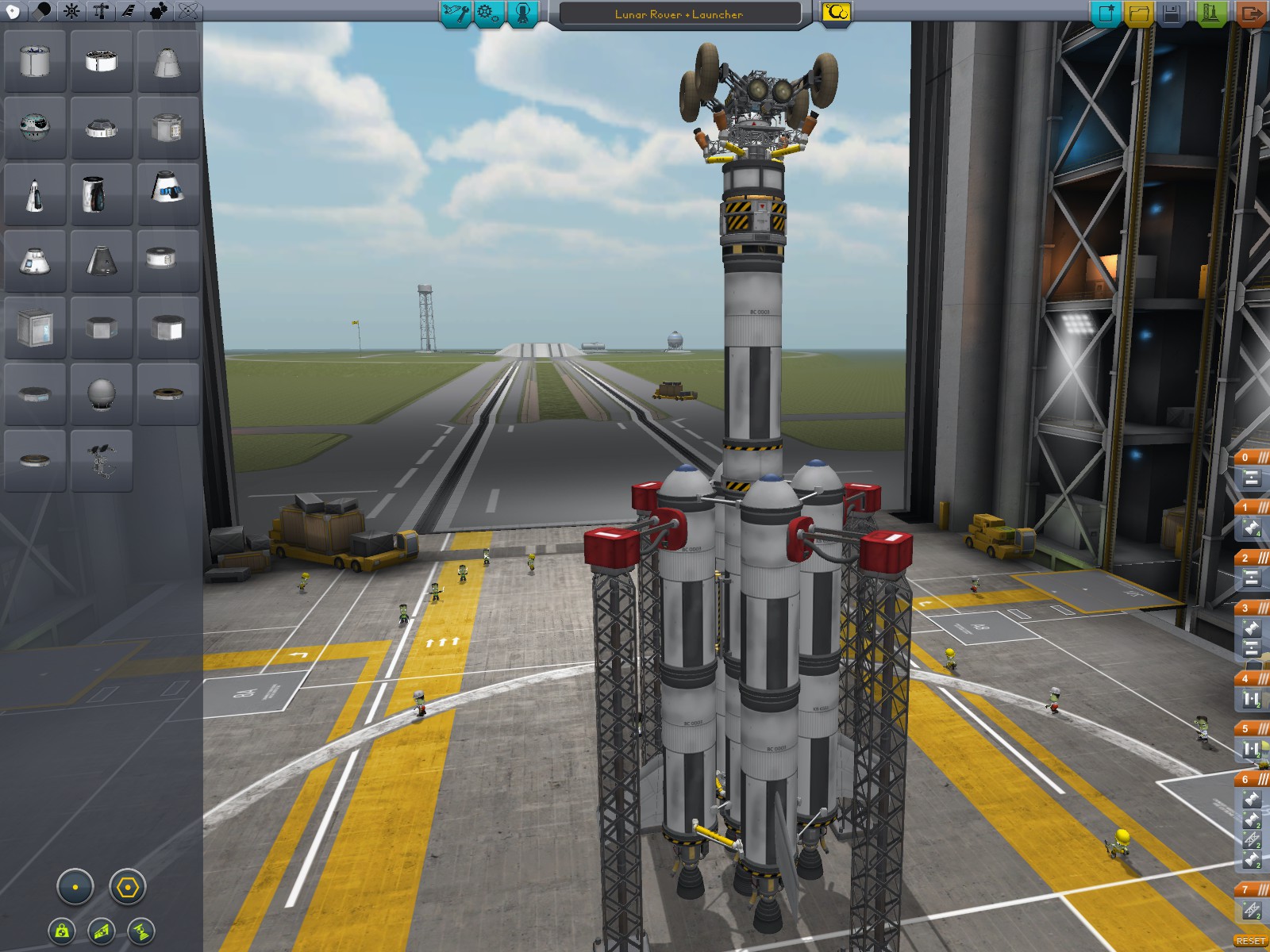
Launched separately, the Munar Rover Mk II would be taken to Mun orbit by the last stage of the small ascent rocket. The booster stage would also be in charge of performing the deorbit maneuver around the Mun and provide a powered descent until reaching a height where the skycrane could take over.
Continue to Reconaissance ...
< Discovery | Reconaissance >