Reconnaissance
As per mission planning, the rover would be sent to the Mun in advance of the kerbonauts. Its main objective was doing an autonomous ground reconnaissance of TGA-1 and the surrounding munar landscape, in preparation for the manned lander.
The launch, trans-munar injection and munar capture were routine and uneventful.

It may be routine by now, but low munar orbit always comes with its amazing sights ...
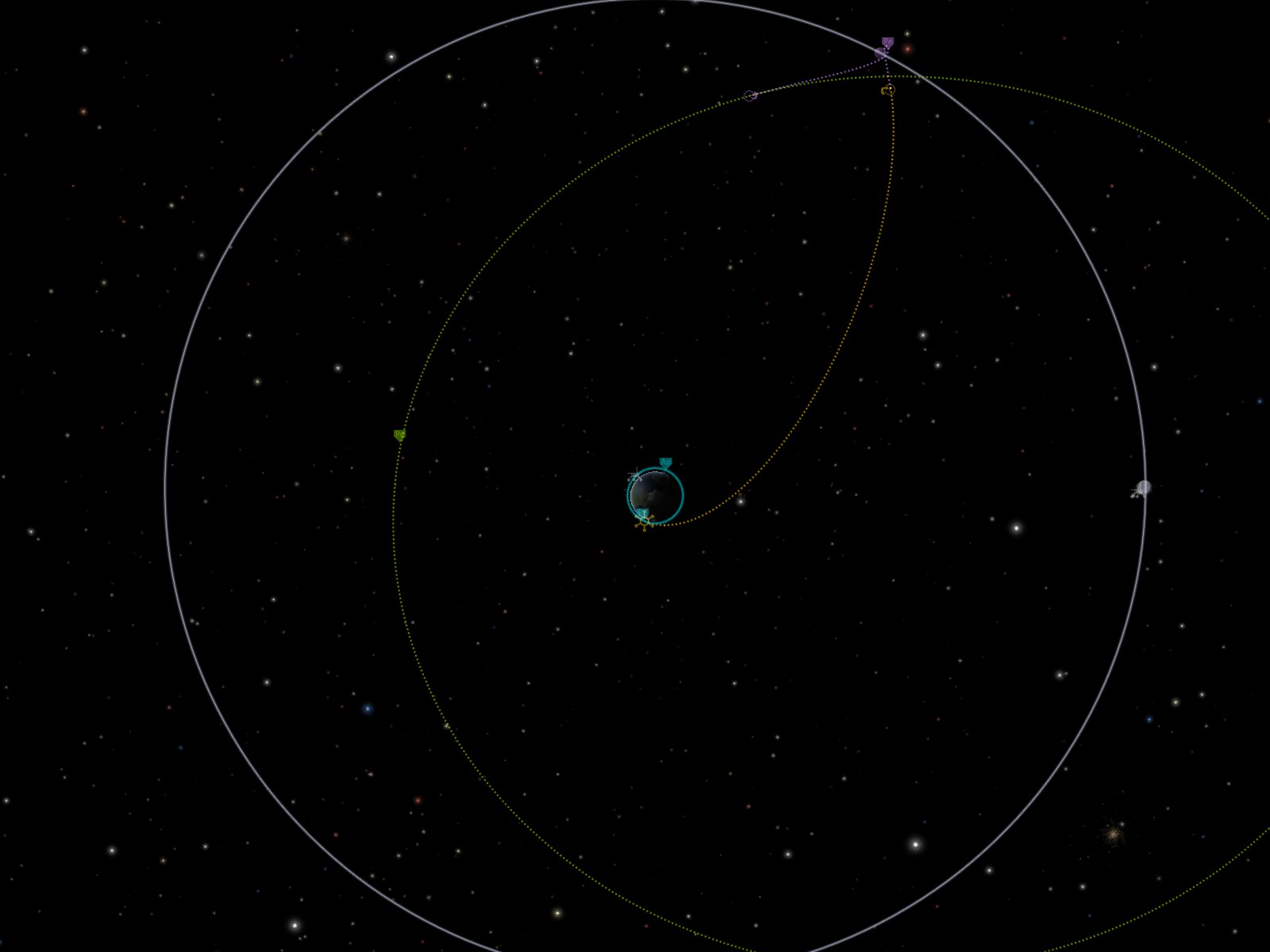
After orbital inclination change, the booster stage and rover arrived within sight of the designated landing spot, which was marked by a radio beacon sent beforehand — and within visual range of TGA-1 itself.

As descent began, the enormous size of TGA-1 was made apparent.

Around 2000 m above ground, the booster stage was jettisoned and the skycrane powered its engines, continuing with the descent. Finally, a few meters from the ground, the skycrane cut its engines, gently put the rover on the surface, dettached, flew away ...

... and crashlanded a couple hundred meters from the rover.

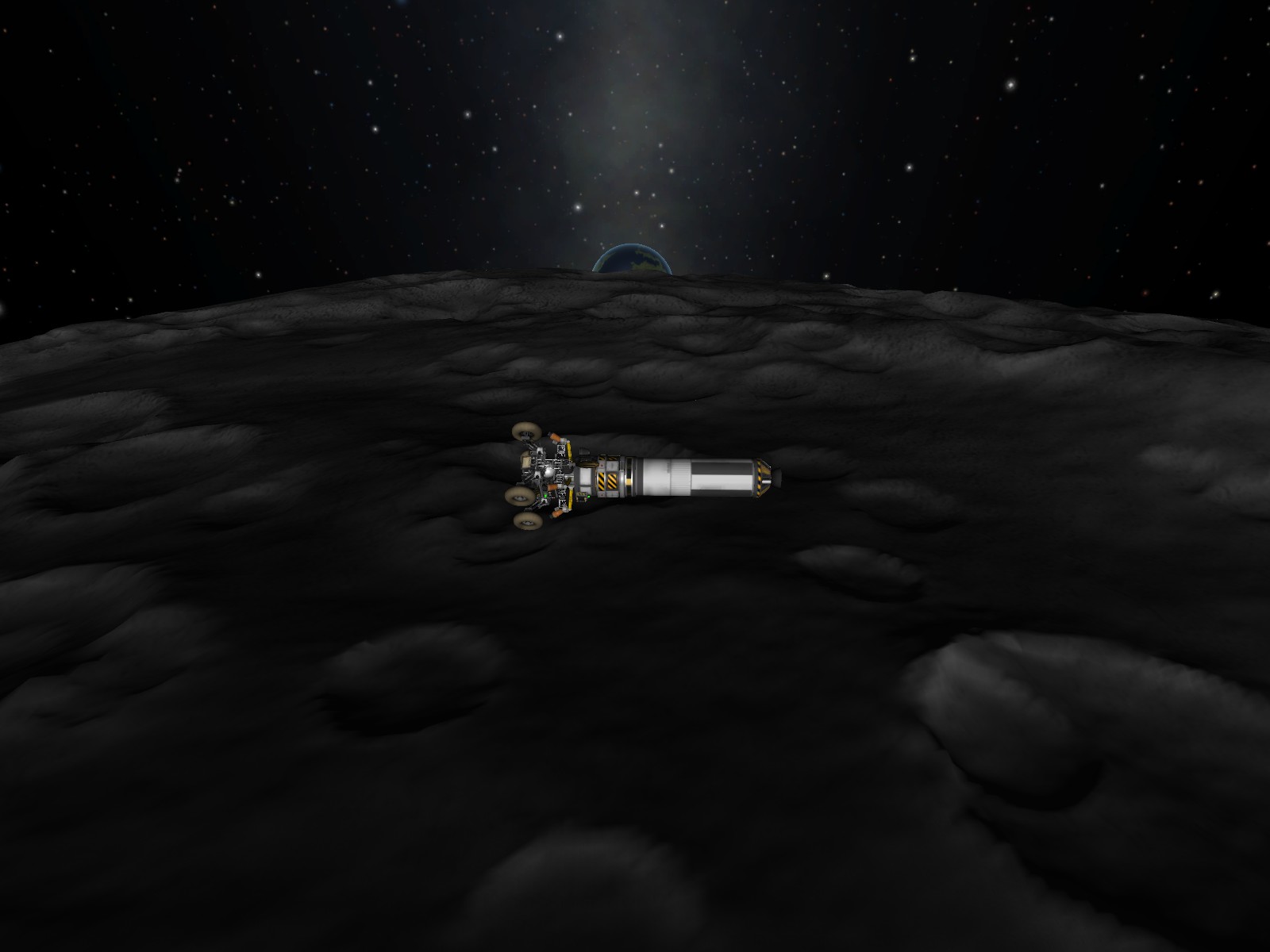
The rover had landed and was ready for exploration.

The terrain around TGA-1 is treacherous, as it's located on the very rim of the Tycho Impact Basin. The rover's landing site, a large crater just outside the Tycho Basin, is flat enough for high-speed roving, but as the rover approached, the slope increased gradually and reached more than 20° of inclination. As the rover's wheel motors had a maximum rating of 15°, the rover had to carefully navigate the terrain to find a safe route to TGA-1
It was a slow and complicated process, but eventually the rover made it: TGA-1 was but some dozen meters away.

The initial images confirmed that TGA-1 seemed to be an arch-like rock formation almost 100 meters tall. Its precise location and the optimal route to reach it were recorded, and the rover began its trip back to the plain below. Having accomplished is autonomous mission, it entered into standby mode and awaited the arrival of the kerbonauts.
Continue to Launch ...
< Munar Rover | Launch >